| [zurück] | Talbot´s Kurve |
[vor] |
Sie wurde nach Henry Fox Talbot benannt, einem englischen Mathematiker. Die Parameterdarstellung lautet.
|
X(t) = (a2 + f2 * sin2(t*pi)) * cos(t*pi) / a |
1-47 |
|
|
Y(t) = (a2 – 2 * f2 + f2 * sin2(t*pi)) * sin(t*pi) / b |
1-48 |
Diese Funktionen sind schon recht kompliziert aufgebaut und es ist schon schwierig die richtigen Konstanten auszuwählen. In Cinema geben wir folgendes ein.
|
X(t) |
: |
(1.21 + 1 * sin(t*pi)* sin(t*pi)) * cos(t*pi) / 1.1 |
|
|
Y(t) |
: |
(-0.79 + sin(t*pi)* sin(t*pi)) * sin(t*pi) / 0.666 |
|
|
Z(t) |
: |
0 |
|
|
t-Min |
: |
-1 |
|
|
t-Max |
: |
1 |
|
|
Dt |
: |
0.01 |
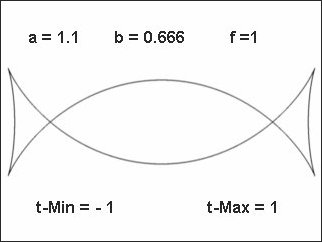
Abb. 13
| [zurück] | [Inhaltsverzeichnis] | [vor] |